Last month, the ScanPyramids project, led by a team of researchers from the University of Cairo’s Faculty of Engineering in Egypt and the HIP Institute in France, announced that they’d used muon imaging to discover a large void hidden deep inside the Khufu’s Pyramid (also known as the Great Pyramid of Giza, since it’s the big one). Nobody knows what’s inside, or if there’s anything inside at all, or even if maybe that’s where the Stargate is stashed. Obviously there’s a lot of interest in what may or may not be hiding out in here, and it could help solve mysteries like how and why exactly the pyramids were built.
The problem is that (understandably) we’re not going to just start blowing holes in the Great Pyramid to see what’s going on. In 2002, Egyptologists used a custom exploration robot (made by iRobot, in fact) to explore a small shaft leading out of the Queen’s Chamber in the Great Pyramid that was sealed by a door. Rather than try to open the door, likely destroying it in the process, the robot drilled a tiny hole just large enough to poke a camera through in an effort to do the minimum amount of irreversible damage to the only wonder of the ancient world that we’ve got left. All that they found on the other side was another door, but the point is that if we want to explore the pyramid, we’re going to have to do it through holes that are as tiny as possible.
French research institutes Inria and CNRS are working with ScanPyramids to develop an exploration robot that can squeeze through a tiny hole while still maximizing the amount of exploration that it can do once it’s through. The concept that they’ve come up with is a robotic blimp that can be stuffed through a 3.5-centimeter hole, unfold and inflate itself, and then explore large areas before deflating and escaping again.
This system consists of two robots, both of which are small enough to fit through the 3.5-cm diameter hole drilled through as much ancient monument that you should probably not disturb as is necessary. The first is a tubular robot equipped with an omnidirectional camera that goes in first to survey the area, sending back high resolution pictures.
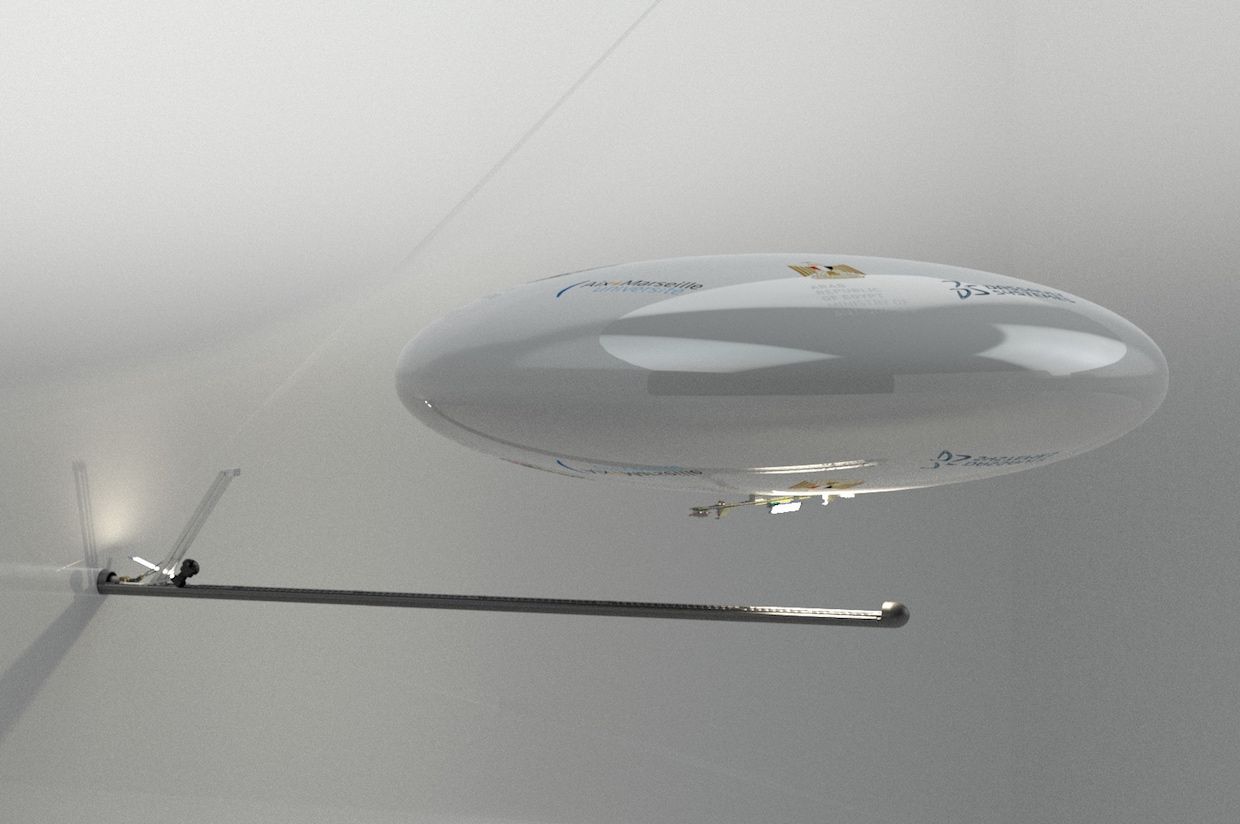
If everything looks appropriately safe and exciting, the same hole gets used to insert a folded-up miniature robotic blimp. Once inside, the blimp is inflated with helium and unfolds to a diameter of 80 cm. It then undocks and floats off with a 50-gram payload of motors and sensors, including lights, cameras, and assistive navigation systems. Once its mission is finished, the blimp returns to its dock, deflates and refolds, and comes right back out the same hole.

Doing exploration like this with a fold-up flying robot sounds like it might be unnecessarily complicated and risky, but there are quite a few good reasons why it would be better than other types of ground robots with wheels, tracks, or legs, or drones with rotors. A blimp doesn’t have to worry about stairs, rocks, ramps (or traps). You get a much better perspective from a blimp, and you can also cover more area more quickly. Blimps can also harmlessly bounce off of obstacles and are less likely to crash than a conventional rotorcraft, and you have to figure that a blimp crash (if it does occur) would be much more pillowy in nature.
For more details about how this would all work, we spoke with Dr. Jean-Baptiste Mouret, a senior researcher at Inria, who’s leading the team developing the system. You may remember some of Mouret’s work that we’ve covered in the past about how to make robots that can autonomously recover from limb damage, and it sounds like some of those skills are making their way into this blimp as well.
IEEE Spectrum: How was the hole diameter of 3.5 cm decided on? Why not use a larger hole to make things easier?
Jean-Baptiste Mouret: It is a compromise: On the one hand, we want to drill a hole as small as possible to minimize the change to the building; on the other hand, it has to be big enough to fit all the actuators, sensors, and mechanisms that we need. In addition to leaving bigger traces, a big hole might also affect the integrity of the building (keep in mind that we are targeting buildings that may be thousands of years old) and we need to minimize the risk of a collapse. And, of course, we like the challenge: If the drilled hole is big, there is no need for a new design and not that many opportunities for novel ideas!
What are some of the challenges of fitting all of the necessary hardware into such a small diameter?
Besides the usual technical challenges with miniaturization, we need to machine or 3D print many small parts, and there are a lot of moving parts—for instance, the current design of our tubular scout robot has more than 140 ball bearings. We started with our Ultimaker 2 3D printer because it was faster than machining and 3D printing allows us to make highly complex shapes. But it was very hard to the get small parts right. We recently bought a Form 2 3D printer, which is amazing for small and complex parts. Our prototypes are now much better and we can print new parts several times a day.
I read that the blimp will be equipped with “bio-inspired sensors and principles.” Can you elaborate on that?
The gondola of the blimp cannot weigh more than 50 grams because of the helium volume of the envelope. With that mass, we cannot carry a Kinect, a lidar, or similar high-definition sensor. It is also hard to do anything that requires complex computations because this would significantly impact the autonomy. And the robot will not be able to use a GPS since it will be inside a building. We therefore need something else.
This is why we reached out to the Institut des Sciences du Mouvement (CNRS/Aix-Marseille Université) in Marseille, which has developed several very lightweight sensors for small UAVs by taking inspiration from bees and flies. More precisely, we are interested in two sensors:
- A miniature optic-flow sensor that can operate in low-light conditions. It is now well established that insects have neurons that are sensitive to the optic flow, that is, to the vector field of the apparent angular speed of objects, surfaces, and edges in a visual scene generated by the relative motion between an observer (an eye or a camera) and the scene. These optic flow-sensitive neurons allow insects to visually takeoff, land, and avoid obstacles (typically by balancing the optic flow on the left and on the right), while relying on a small number of neurons. Our flying robot uses the same strategy to be able to go back to its base if it loses the radio signal link and to help the pilot to avoid obstacles. Essentially, we are combining an optic flow sensor, a magnetometer, and a distance sensor that points towards the ground so that the robot can “replay” its path.
- We are also interested in a second miniature sensor developed at the same institute called the HyperCube, which can do active marker tracking (infrared blinking LEDs on the blimp) while being fitted in a very small package (1 cm3/0.33 g). This sensor uses the concept of “hyperacuity” in insects: the ability to locate a contrasting object with a greater resolution than the theoretical (static) resolution, which can be induced by scanning movements (e.g. vibrations) of the sensor or, like in the HyperCube, with a high-frequency flickering LED (> 1 kHz). We need this sensor to allow our miniature blimp to precisely land on the docking station.
Can you describe how the blimp will dock and then deflate and refold itself?
Inflation and folding are two of the main challenges with this concept. For the docking, we will rely on the HyperCube sensor to land precisely on the platform. For the inflation/deflation/folding, we are exploring several approaches and we already performed a few experiments in the lab, but it is too early to reveal which approach we will choose. What is clear is that we cannot leave the electronics and the envelope inside a thousand-year-old monument. We really need a good and reliable extraction technique.

That’s a good point. With such a small access point and an untethered flying robot, are you concerned about losing the robot inside if something goes wrong?
Unfortunately, tiny flying robot (blimps or quadcopters) cannot carry a tether because this would weight too much (even a light wire), add friction because of the part of the wire on the floor (and the small UAVs cannot pull much), and, overall significantly disturb the flight when we want to do more than hovering.
This is why we are using the lightweight bio-mimetic sensors to design a “virtual tether”: the robot needs to be able to come back autonomously even if it loses the radio connection and it needs to dock more or less autonomously (so that we do not rely on expert piloting skills).
If something very bad happens—for instance, we lose a propeller—then we will rely on our “Intelligent Trial & Error” algorithm to search for alternative flight controllers. This algorithm is designed to be embedded on lightweight hardware (since many things are precomputed) and does not need a diagnosis (which would be very challenging on such small machines with almost no internal sensor).
What other potential applications exist for a robot with these capabilities in this form factor?
Besides archaeology, we have talked with people in the nuclear industry for routine inspection or post-disaster assessment. And we are still exploring other fields: Being able to send a flying robot through a very small hole can surely be used in many situations.
Where do you think would be the most exciting or valuable place to first deploy this robot?
The most exciting place would obviously be the Great Pyramid, in which the ScanPyramids mission recently discovered at least three important voids using cosmic-ray muon detectors: A big void above the Grand Gallery, the start of a corridor on the North face, and a smaller void on the North-East edge. We recently joined the ScanPyramids team to think about the constraints implied by such a project and be ready if there is an opportunity. However, the ScanPyramids teams needs first to refine the positions of the voids (with more muon measurements) and we will, of course, need authorization from Egyptian authorities before doing anything. For now, sending our robot in the Great Pyramid is still a dream: There is no concrete plan yet, and we might end deploying the robot in other places.
Mouret says that they have a good prototype of the first robot, the tubular scout with the lights and camera to do the first survey. The blimp itself is a bit trickier, and they’re still working on the system to inflate, deploy, and then capture and refold the robot. Hopefully, by the time ScanPyramids figures out exactly where they want to explore, the robots will be ready to get to work.
[ Inria ]